由 刘旭伟 在 8 个月 之前添加. 更新于 8 个月 之前.
0%
描述
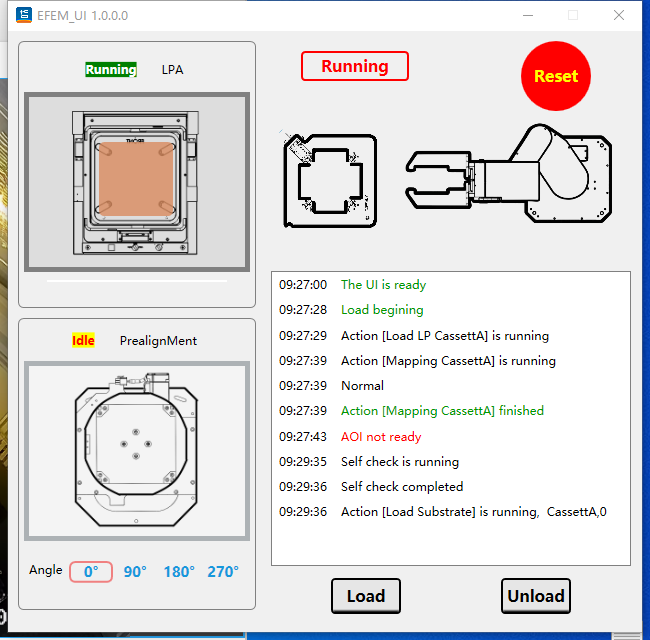
在执行Load/Unload过程中,机械手和Smif盒的基片在位状态,无法实时更新
文件
现在更改为,机械手取片,夹爪夹紧后,基板数据更新到机械手臂上。机械手放片,夹爪释放后,基板数据更新到Smif盒里。
导出 Atom PDF