由 尤亚刚 在 超过一年 之前添加. 更新于 大约一年 之前.
0%
描述
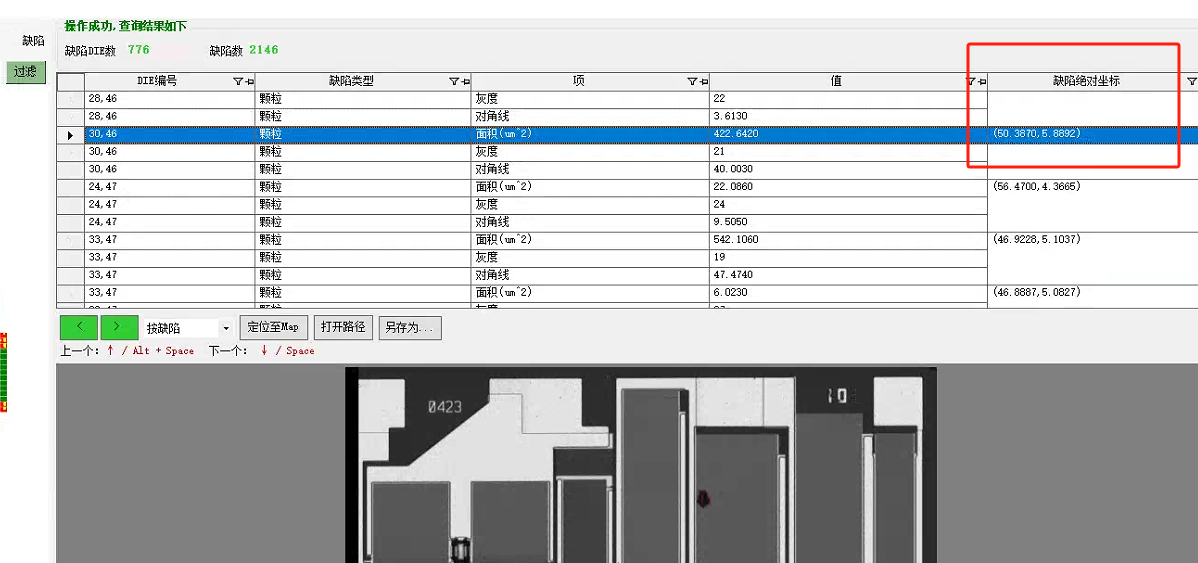
相机旋转旋正后,缺陷所在的平台坐标和相对坐标错误(如图),都没有将旋转角度带进去计算;但是缺陷定位的时候是正确的,移动的时候带了旋转角度。
文件
导出 Atom PDF
{kind=link}